Robolit Presents at ToRK2018
Robolit is invited to present at the ToRK 2018 conference to be held at Bogazici University from April 12-14. The talk, which was featured as the opening talk on the last day of the conference, covers standard test methods for robotic systems. Chiefly driven by our work as part of the ASTM-NIST-DHS Standard Test Methods for Response Robots we explain how standardization can foster a richer R&D ecosystem and greatly improve efficiency for the customers of such robotic systems.

Robolit Consulted Start-Up Receives $2.7M First Round

 Vence Corp., a California based start-up, received $2.7M in new funding from a group of investors led by Eniac Ventures with participation from the venture capital arm of the Dutch investment bank, Rabobank, which focuses on innovative food and agriculture technologies.
Vence Corp., a California based start-up, received $2.7M in new funding from a group of investors led by Eniac Ventures with participation from the venture capital arm of the Dutch investment bank, Rabobank, which focuses on innovative food and agriculture technologies.

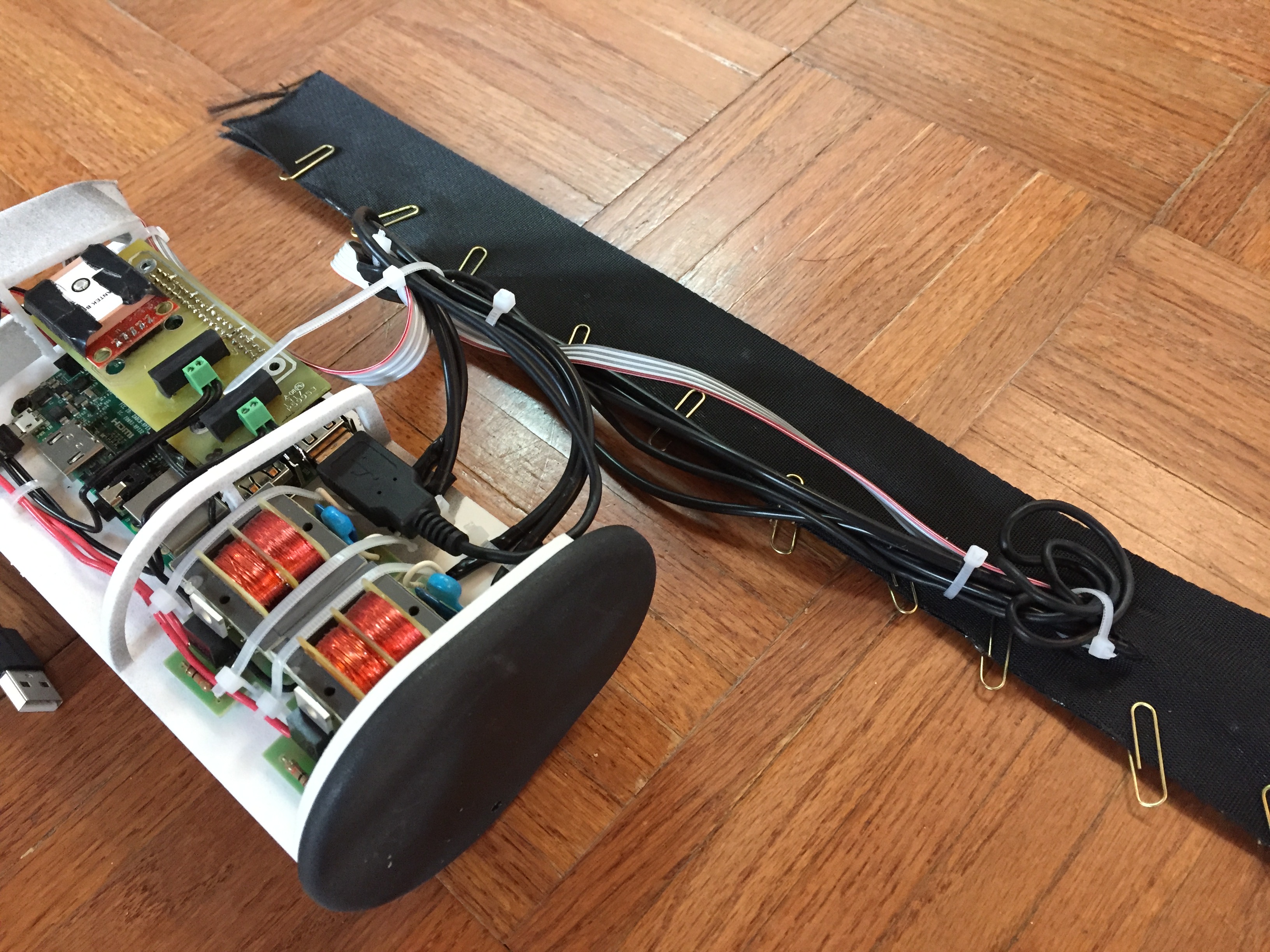
Early prototype cattle mounted Vence systems.
Robolit has been working with the Vence team since the beginning of the project as a technology development consultant. In a short period of time starting late December 2016 we designed and developed several iterations of the proof of concept system. While our primary contribution was the algorithmic basis of the animal management system, our work also covered the implementation of electronic and software components that make up the prototype. We also conducted several field tests in Arizona and California with the Vence management.

A scene captured during our last field trip to San Fransisco, CA to test the Vence prototype system.
Vence aims to revolutionize cattle management with far reaching implications for food security and reduction of the ecological impact of meat production. We are extremely proud to be part of this amazing team and looking forward to future collaborations.

Vence Saga Continues
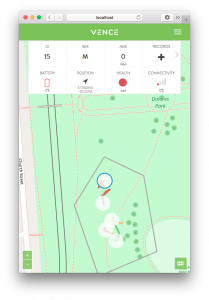
Compatibile with any web enabled device the new UI presents a clean interface to the user for herd movement management and tracking animal status.
We are back in the sunny San Fransisco, California for the fourth installation of the Vence field tests. Building on the experience and the tool set we developed in earlier tests in Point Reyes and Phoenix this time around our focus will be primarily on the algorithm development and testing rather than hardware prototyping.
In the time since our last field trip we have introduced a slick new UI for visualization and management of herd behavior which will get its first field use in this trip. In addition we will be fielding our improved data collection tools for testing and evaluation.

Third Vence Field Tests Successfully Concluded
A small herd of cattle we employed during our experiments during our work in Point Reyes. The last day of the 10-day excursion was sunny but still quite windy and cold.
We have concluded our 10-day field test for the Vence Project, which had started on April 5th. Took place in the beautiful Point Reyes National Shoreline, this third meeting of the group has been the most exciting time of our work to date. We made great discoveries and conducted very successful trials. It seems that the project will get even more exciting in the coming months.
During this trip we setup shop at two different locations: downtown San Fransisco for the initial assembly and tests; and Bolinas, CA for the day to day cattle experiments. I thank project’s media expert and consultant, Mike North, for his hospitality at his home in Bolinas and letting me turn the living room into a workshop for a few days.
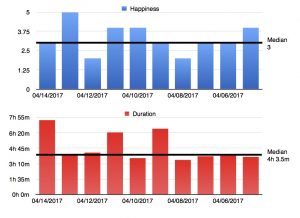
Sleep and Happiness at Vence Field Trip 3
As much as the discovery process during field tests was fun, it was also quite demanding on us. The graph here shows the amount of daily sleep time over the course of the trip. As with any investigative work into uncharted territory we unavoidably come across some failures, which in turn caused disappointment. The trick in creative work is to maintain persistence in the face of such negative developments. All walls crack if you hit then with your head a sufficient number of times.

Celebrating a successful set of test in the ranch at the signature restaurant of Bolinas, CA.
At the end the trip was an astounding success in a developing new technological field of cooperative biology/machine teams. In just three months we made great strides. Deservedly, we celebrated our accomplishments with unbelievable Oysters from the Point Reyes.
We are looking forward to the next installation of our field tests!

Meet the Experimental Gentleman

Meet Mike North, a multi-faceted man who loves technology in all forms and shapes.
During our third field tests for the Vence Project we met with one of our oldest colleagues, Mike North. He graciously let us turn his home in Bolinas, CA into a temporary workshop for the work we conducted in Lucky Ranch in Point Reyes National Seashore.
Mike, or better known as the Experimental Gentleman, is a multi faced lover of technology. Our first work together was the infamous 6×6 All-Terrain Vehicle episode of the Discovery Channel’s Prototype This! show. Most of our projects together were out of the box. Case in point Dancing Hexapod Swarm for IDF’2015.
Dr. North is involved in a number of projects. Most notably he is the founder and lead of the Reallocate, a platform that brings together resources of all kinds for social good. At his company, North Design Labs, he works on various technology related TV show, appears as speakers in international events and provides consulting to technology companies.
During the last Vence field tests Mike helped us capture our work on camera and will be producing a detailed multimedia presentation. We had some exciting exchanges during this time and hoping to setup a cool technology event in Summer 2017 at Drita Hotel located by the gorgeous and historic Mediterranean coastline in Alanya, Turkey.
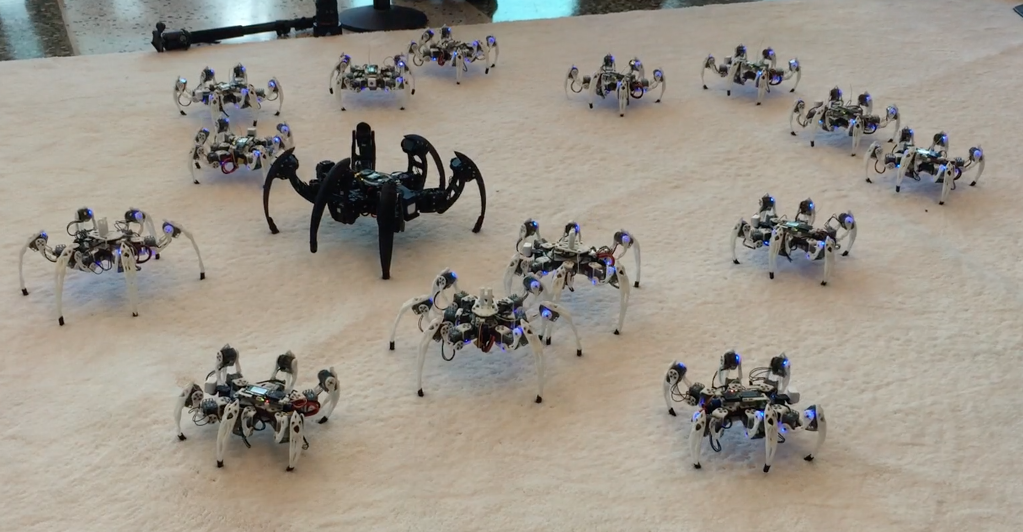
Dancing Hexapod Swarms

Intel Edison powered hexapod robots designed by the Intel research team.
A blast from the past. In 2015 Robolit participated in the Intel Developer Forum as a design consultant as part of the keynote speaker technology demonstration. We were tasked with making a 50 member hexapod robot swarm to dance to the Up Town Funk.
In the course of our work we produced the World’s first Mexican wave by robots. A lighting effect added into the Marauder, a hexapod with unique sliding mode locomotion mechanism, transformed the machine into a Starwars character. A list of video clips from this work can be found at the Robolit YouTube channel.
First Week at the 3rd Vence Field Test has Passed

Lush green hills of Point Reyes where the Vence tests are conducted. Unfortunately in April such sunny days are few.
We have completed the first week of the third field tests for the Vence project. As usual the week was full of all-nighters, excitement across the team, highs and lows.
Our initial tests suffered from several logistical issues such as poor wifi connectivity and spotty GPS tracking. Further investigation revealed issues with the packaging of the the experimental collar. To identify the most effective construction we implemented three different packaging solutions and tested them in the field. We quickly converged to an effective solution that respects the issues caused by large battery in the package and the bodies of 1,500 lb animals.

Crossing the Golden Gate Bridge in a overcast and drizzly weather on our way to the test ranch.
Unfortunately, the weather during the first week was not very agreeable. While the Point Reyes offers an exquisite natural expanse, the overcast and windy conditions made it hard to execute tests. Combining this with the needed to move back and forth a not-always-agreeable herd of cattle in mud made our days quite demanding. However, looking back just three months ago when this project started, I would say we are fast becoming seasoned cowboys. Yeehaw!
Celebrating a successful set of test in the ranch at the signature restaurant of Bolinas, CA.
Cattle movement behavior is dictated by a few drives, such as hunger and herd attraction. While our goal is to manage herd movement in general settings, our initial investigative and debugging tests focus on simplified settings where a single animal is managed and observed. After successfully testing our sensory and stimulation subsystems on animals we started with a series of simple management scenarios where the stimulation decisions were made manually. These settings allowed us to evaluate our hypotheses about the best way to influence cattle movement decisions. As with any scientific process some of our ideas were refuted in this experimental process, and we discovered some new insights. Though, I am happy to report that we did observe repeatable and predictable relationship between our control actions and animal’s movement, which will serve as the build block of the ultimate mechanism.

Revised experimental Vence collar hardware during assembly process.
One of these observations in the initial manual experiments suggested a fundamental change in the hardware. The last couple days were spent on construction of this new setup, modification of the code base accordingly and repeat of the tests. Again the results were quite promising.
As we are entering the second week of the field tests we are preparing for the debut of the autonomous cattle management system. Again we will start with single animal settings where the animal will be geographically constrained in virtual fence lines. Next, we will move to groups of animals. The movement management in the context of complex herd dynamics is an uncharted territory. We are confident that the problem is solvable but probably more sleepless nights await us.

First Day in the Ranch to Test Vence Prototype 3

Sequoia tree forest on the way to Lunny Ranch where our field tests take place.
After the initial tests and assembly we arrived at the Lunny Ranch where we will be conducting our field tests for the Vence system. About a 1.5 hour drive from San Fransisco the commute to and from the ranch through the amazing Bay Area forests provides an excellent time for reflection on observations and discussions on future steps. Our first day in the ranch was rather rainy. We had drizzles and wind for most of the time we were there.

Cattle herd at the Lunny Ranch
Situated over a 1500 acer grass land Lunny Ranch has a herd of 100+ Angus cattle. The owner and manager of the ranch is a very progressive gentleman who offered us his insides and critique about certain aspects of our approach.
The third experimental cattle mounted system offers significantly improved mechanical properties and ease of use. When handling animals upward 1,500 lb who are easily excitable it is crucial to be able to attach and detach the unit quickly. The rainy first day also confirmed for us that the new and improved enclosure provides necessary splash proof protection which will be necessary for long term test coming later in the year.

Cattle at the Lunny Ranch in a pen prior to a test run. One animal is instrumented with a Vence Cattle Rider unit.
Completed Initial Debugging of the Collar Stack

Our electronics assembly shop during the third Vence field trip.
In our first couple days we will be assembling and testing the collar version 3. There are mechanical, electrical and software components that were designed on separate tracks over the past month. These components are coming together today.

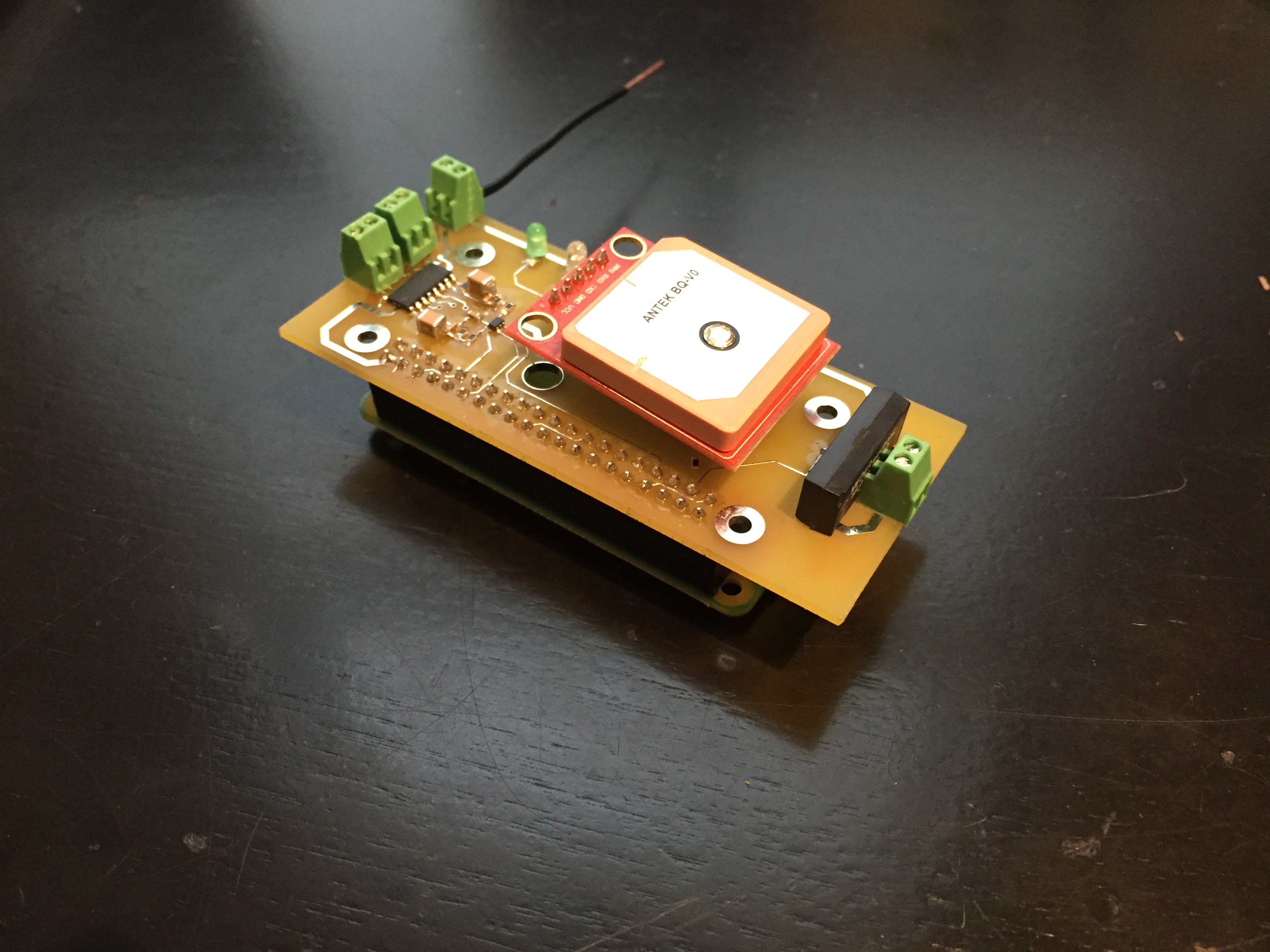
Fully assembled test stack for the Vence collar v3.
The stack consists of various sensors such as GPS. An onboard state estimator software employs all available sensors along with a crude kinematic model of a cattle to estimate its behavioral configuration.
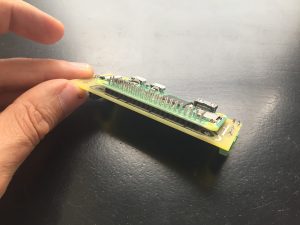
Partially assembled electronics stack for the Vence collar v3. The bottom board is our custom design. The top board is a RPi Zero W.
The heart of the design is the behavioral control algorithm under development. In its core Vence system is a distributed control architecture. This proprietary mechanism decides how to stimulate each cattle based on global goals and local information in order to produce the desired herd level movement behavior.

Third Vence Field Trip Started

Robolit has arrived sunny California today to conduct the third set of field tests for the Vence cattle herd control system. Our tests will take place at a ranch near San Fransisco—a definite change in climate compared to previous trips in Arizona.
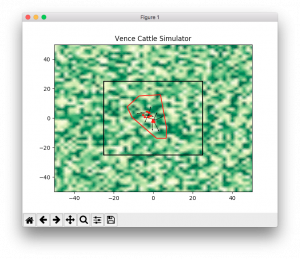
A snapshot from a simulation run where Vence herd management algorithm confines virtual cows in a polygonal virtual fence.
The preamble to this trip was the development of a simulation engine. We constructed a 2D virtual space consisting of cattle and physical fences. We build a simplified cattle behavior model as a combination of basic drives such as hunger, herd instinct and pain avoidance. Within this virtual environment we executed the Vence distributed virtual fence control algorithm to evaluate different strategies and debug the higher level decision making processes.
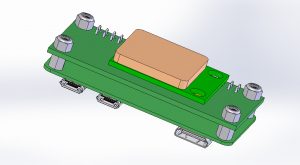
3D model of the electronics stack in the Vence Collar Prototype 3.
Previous field trips were very informative about cattle farms. These earlier experiments also showed us various ineffective design approaches in the face of realities of a cattle farm. Empowering our team with the addition of an industrial designer our third prototype is more compact, robust and easy to use. We also completely restructured the code base to produce a more streamlined and customizable distributed control architecture.
We are looking forward to running tests and with little luck we will demonstrate the efficacy of the technology we developed for Vence.