
Third Vence Field Trip Started

Robolit has arrived sunny California today to conduct the third set of field tests for the Vence cattle herd control system. Our tests will take place at a ranch near San Fransisco—a definite change in climate compared to previous trips in Arizona.
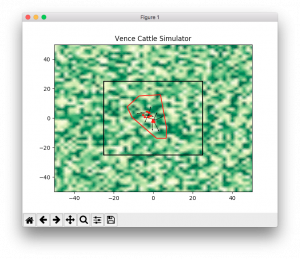
A snapshot from a simulation run where Vence herd management algorithm confines virtual cows in a polygonal virtual fence.
The preamble to this trip was the development of a simulation engine. We constructed a 2D virtual space consisting of cattle and physical fences. We build a simplified cattle behavior model as a combination of basic drives such as hunger, herd instinct and pain avoidance. Within this virtual environment we executed the Vence distributed virtual fence control algorithm to evaluate different strategies and debug the higher level decision making processes.
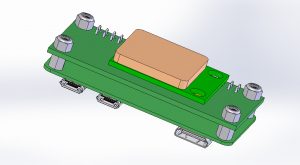
3D model of the electronics stack in the Vence Collar Prototype 3.
Previous field trips were very informative about cattle farms. These earlier experiments also showed us various ineffective design approaches in the face of realities of a cattle farm. Empowering our team with the addition of an industrial designer our third prototype is more compact, robust and easy to use. We also completely restructured the code base to produce a more streamlined and customizable distributed control architecture.
We are looking forward to running tests and with little luck we will demonstrate the efficacy of the technology we developed for Vence.
Haldun administrator
Dr. Komsuoglu is a robotics expert and entrepreneur with over 20 years of research, development and start-up experience. Focusing on biologically inspired high-performance mobility and high-dexterity manipulation systems Mr. Komsuoglu served as a key personnel in several critically acclaimed multi-institutional robotics projects sponsored by Defense Advanced Research Projects Agency (DARPA), United States Army Tank Automotive Research, Development and Engineering Center (TARDEC) and National Science Foundation (NSF). Some noteworthy projects he was involved with includes DARPA-CBS, DARPA-RHex, DARPA-RiSE, NSF-FIBR and MA-UGV. In these projects Dr. Komsuoglu engaged experimental robotic research, simulation, embedded system development (hardware/software), control systems engineering and analytic studies. Since 2006 Dr. Komsuoglu has been heavily engaged in business development. He founded and ran technology start-up companies focusing on commercialization of several robotic technologies he helped develop. In 2009 he founded Robolit LLC (https://www.robolit.com) providing design consulting for academic research equipment, search and rescue systems for first responders and military applications. His current work focuses on remotely controlled UAVs with a unique UI system employing virtual reality devices with applications in first response and entertainment industry. Since 2011 Dr. Komsuoglu has been serving as an active member of the DHS-NIST-ASTM Standard Robot Test Methods committee and is responsible of development of manipulation test methods.
2 Comments so far
Third Vence Field Tests Successfully Concluded – Robolit LLCPosted on 6:10 am - Apr 21, 2017
[…] have concluded our 10-day field test for the Vence Project, which had started on April 5th. Took place in the beautiful Point Reyes National Shoreline, this third meeting of the group has […]
Robolit Consulted Start-Up Receives $2.7M First Round – Robolit LLCPosted on 3:55 pm - Feb 24, 2018
[…] Robolit has been working with the Vence team since the beginning of the project as a technology development consultant. In a short period of time starting late December 2016 we designed and developed several iterations of the proof of concept system. While our primary contribution was the algorithmic basis of the animal management system, our work also covered the implementation of electronic and software components that make up the prototype. With the Vence management we conducted several field tests in Arizona and California. […]
About the Author