
Robolit Consulted Start-Up Receives $2.7M First Round

 Vence Corp., a California based start-up, received $2.7M in new funding from a group of investors led by Eniac Ventures with participation from the venture capital arm of the Dutch investment bank, Rabobank, which focuses on innovative food and agriculture technologies.
Vence Corp., a California based start-up, received $2.7M in new funding from a group of investors led by Eniac Ventures with participation from the venture capital arm of the Dutch investment bank, Rabobank, which focuses on innovative food and agriculture technologies.

Early prototype cattle mounted Vence systems.
Robolit has been working with the Vence team since the beginning of the project as a technology development consultant. In a short period of time starting late December 2016 we designed and developed several iterations of the proof of concept system. While our primary contribution was the algorithmic basis of the animal management system, our work also covered the implementation of electronic and software components that make up the prototype. We also conducted several field tests in Arizona and California with the Vence management.

A scene captured during our last field trip to San Fransisco, CA to test the Vence prototype system.
Vence aims to revolutionize cattle management with far reaching implications for food security and reduction of the ecological impact of meat production. We are extremely proud to be part of this amazing team and looking forward to future collaborations.

Vence Saga Continues
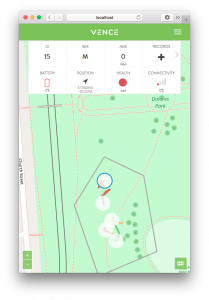
Compatibile with any web enabled device the new UI presents a clean interface to the user for herd movement management and tracking animal status.
We are back in the sunny San Fransisco, California for the fourth installation of the Vence field tests. Building on the experience and the tool set we developed in earlier tests in Point Reyes and Phoenix this time around our focus will be primarily on the algorithm development and testing rather than hardware prototyping.
In the time since our last field trip we have introduced a slick new UI for visualization and management of herd behavior which will get its first field use in this trip. In addition we will be fielding our improved data collection tools for testing and evaluation.

Third Vence Field Tests Successfully Concluded
A small herd of cattle we employed during our experiments during our work in Point Reyes. The last day of the 10-day excursion was sunny but still quite windy and cold.
We have concluded our 10-day field test for the Vence Project, which had started on April 5th. Took place in the beautiful Point Reyes National Shoreline, this third meeting of the group has been the most exciting time of our work to date. We made great discoveries and conducted very successful trials. It seems that the project will get even more exciting in the coming months.
During this trip we setup shop at two different locations: downtown San Fransisco for the initial assembly and tests; and Bolinas, CA for the day to day cattle experiments. I thank project’s media expert and consultant, Mike North, for his hospitality at his home in Bolinas and letting me turn the living room into a workshop for a few days.
Sleep and Happiness at Vence Field Trip 3
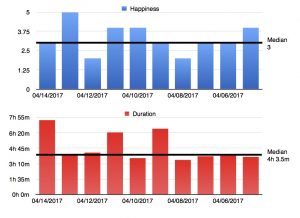
As much as the discovery process during field tests was fun, it was also quite demanding on us. The graph here shows the amount of daily sleep time over the course of the trip. As with any investigative work into uncharted territory we unavoidably come across some failures, which in turn caused disappointment. The trick in creative work is to maintain persistence in the face of such negative developments. All walls crack if you hit then with your head a sufficient number of times.

Celebrating a successful set of test in the ranch at the signature restaurant of Bolinas, CA.
At the end the trip was an astounding success in a developing new technological field of cooperative biology/machine teams. In just three months we made great strides. Deservedly, we celebrated our accomplishments with unbelievable Oysters from the Point Reyes.
We are looking forward to the next installation of our field tests!
First Week at the 3rd Vence Field Test has Passed

Lush green hills of Point Reyes where the Vence tests are conducted. Unfortunately in April such sunny days are few.
We have completed the first week of the third field tests for the Vence project. As usual the week was full of all-nighters, excitement across the team, highs and lows.
Our initial tests suffered from several logistical issues such as poor wifi connectivity and spotty GPS tracking. Further investigation revealed issues with the packaging of the the experimental collar. To identify the most effective construction we implemented three different packaging solutions and tested them in the field. We quickly converged to an effective solution that respects the issues caused by large battery in the package and the bodies of 1,500 lb animals.

Crossing the Golden Gate Bridge in a overcast and drizzly weather on our way to the test ranch.
Unfortunately, the weather during the first week was not very agreeable. While the Point Reyes offers an exquisite natural expanse, the overcast and windy conditions made it hard to execute tests. Combining this with the needed to move back and forth a not-always-agreeable herd of cattle in mud made our days quite demanding. However, looking back just three months ago when this project started, I would say we are fast becoming seasoned cowboys. Yeehaw!
Celebrating a successful set of test in the ranch at the signature restaurant of Bolinas, CA.
Cattle movement behavior is dictated by a few drives, such as hunger and herd attraction. While our goal is to manage herd movement in general settings, our initial investigative and debugging tests focus on simplified settings where a single animal is managed and observed. After successfully testing our sensory and stimulation subsystems on animals we started with a series of simple management scenarios where the stimulation decisions were made manually. These settings allowed us to evaluate our hypotheses about the best way to influence cattle movement decisions. As with any scientific process some of our ideas were refuted in this experimental process, and we discovered some new insights. Though, I am happy to report that we did observe repeatable and predictable relationship between our control actions and animal’s movement, which will serve as the build block of the ultimate mechanism.

Revised experimental Vence collar hardware during assembly process.
One of these observations in the initial manual experiments suggested a fundamental change in the hardware. The last couple days were spent on construction of this new setup, modification of the code base accordingly and repeat of the tests. Again the results were quite promising.
As we are entering the second week of the field tests we are preparing for the debut of the autonomous cattle management system. Again we will start with single animal settings where the animal will be geographically constrained in virtual fence lines. Next, we will move to groups of animals. The movement management in the context of complex herd dynamics is an uncharted territory. We are confident that the problem is solvable but probably more sleepless nights await us.

First Day in the Ranch to Test Vence Prototype 3

Sequoia tree forest on the way to Lunny Ranch where our field tests take place.
After the initial tests and assembly we arrived at the Lunny Ranch where we will be conducting our field tests for the Vence system. About a 1.5 hour drive from San Fransisco the commute to and from the ranch through the amazing Bay Area forests provides an excellent time for reflection on observations and discussions on future steps. Our first day in the ranch was rather rainy. We had drizzles and wind for most of the time we were there.

Cattle herd at the Lunny Ranch
Situated over a 1500 acer grass land Lunny Ranch has a herd of 100+ Angus cattle. The owner and manager of the ranch is a very progressive gentleman who offered us his insides and critique about certain aspects of our approach.
The third experimental cattle mounted system offers significantly improved mechanical properties and ease of use. When handling animals upward 1,500 lb who are easily excitable it is crucial to be able to attach and detach the unit quickly. The rainy first day also confirmed for us that the new and improved enclosure provides necessary splash proof protection which will be necessary for long term test coming later in the year.

Cattle at the Lunny Ranch in a pen prior to a test run. One animal is instrumented with a Vence Cattle Rider unit.
Completed Initial Debugging of the Collar Stack

Our electronics assembly shop during the third Vence field trip.
In our first couple days we will be assembling and testing the collar version 3. There are mechanical, electrical and software components that were designed on separate tracks over the past month. These components are coming together today.

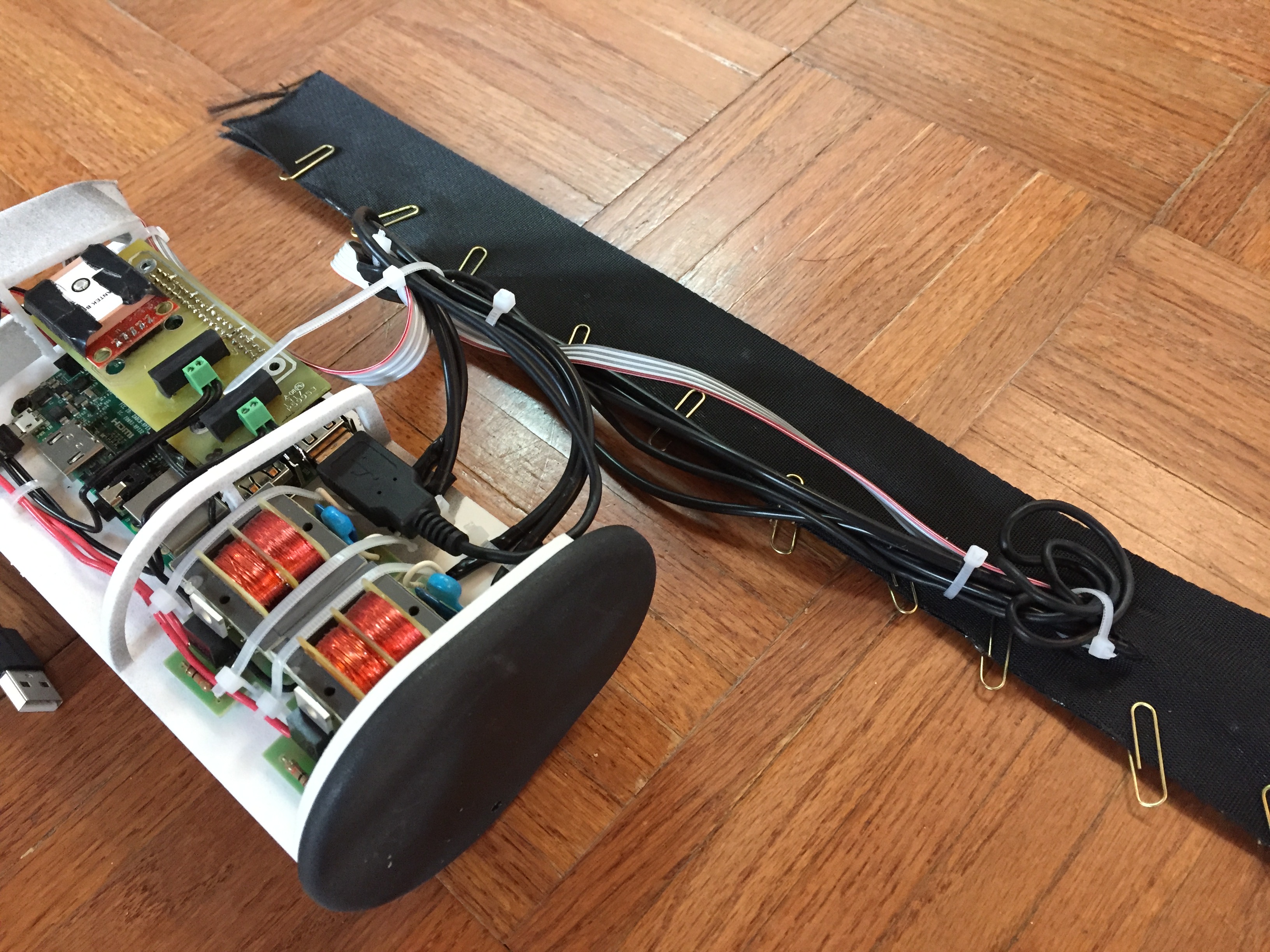
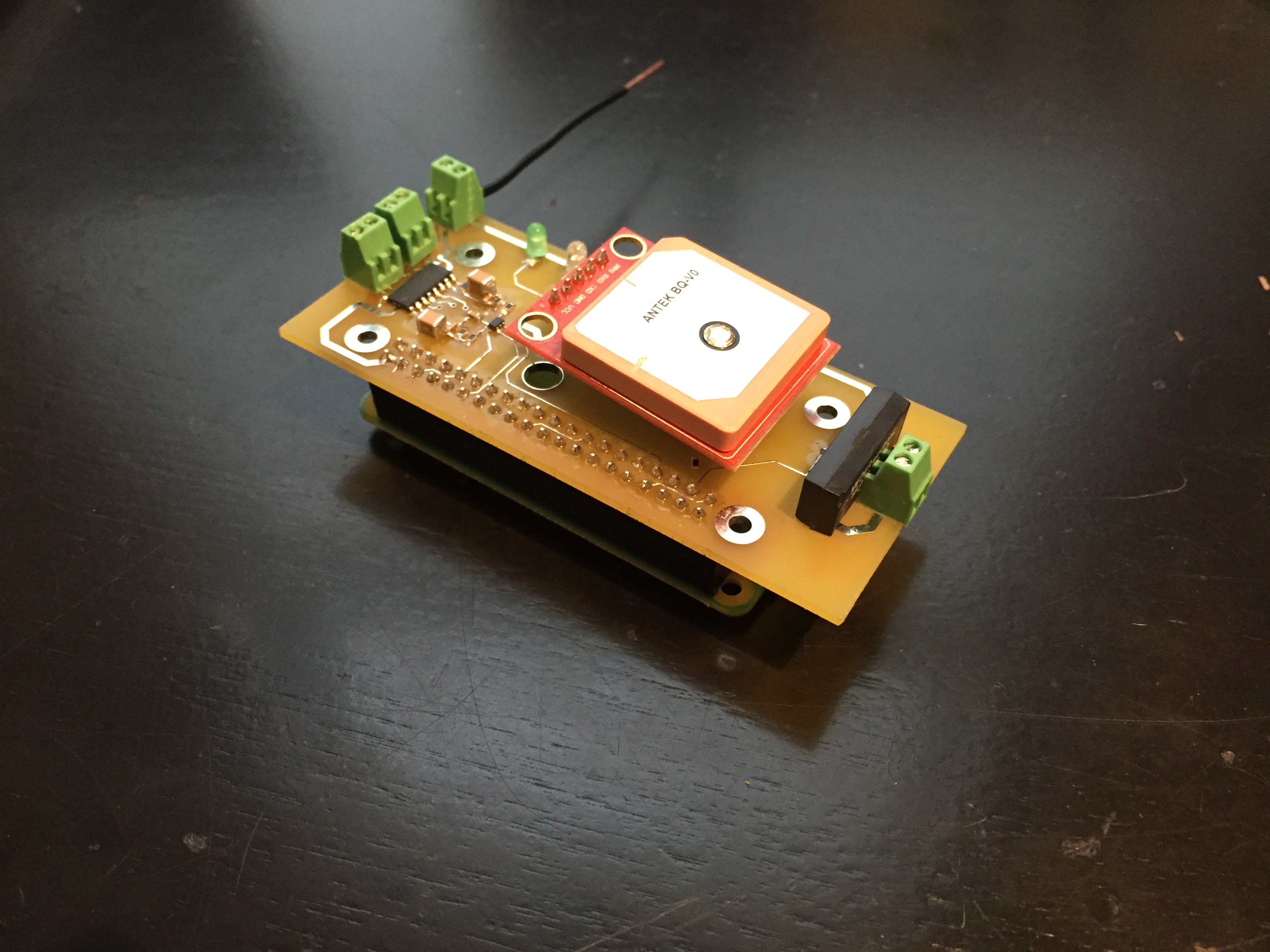
Fully assembled test stack for the Vence collar v3.
The stack consists of various sensors such as GPS. An onboard state estimator software employs all available sensors along with a crude kinematic model of a cattle to estimate its behavioral configuration.
Partially assembled electronics stack for the Vence collar v3. The bottom board is our custom design. The top board is a RPi Zero W.
The heart of the design is the behavioral control algorithm under development. In its core Vence system is a distributed control architecture. This proprietary mechanism decides how to stimulate each cattle based on global goals and local information in order to produce the desired herd level movement behavior.

Third Vence Field Trip Started

Robolit has arrived sunny California today to conduct the third set of field tests for the Vence cattle herd control system. Our tests will take place at a ranch near San Fransisco—a definite change in climate compared to previous trips in Arizona.
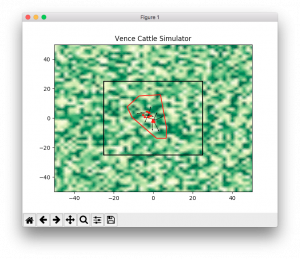
A snapshot from a simulation run where Vence herd management algorithm confines virtual cows in a polygonal virtual fence.
The preamble to this trip was the development of a simulation engine. We constructed a 2D virtual space consisting of cattle and physical fences. We build a simplified cattle behavior model as a combination of basic drives such as hunger, herd instinct and pain avoidance. Within this virtual environment we executed the Vence distributed virtual fence control algorithm to evaluate different strategies and debug the higher level decision making processes.
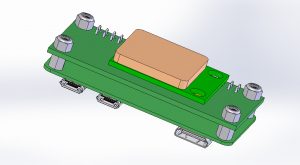
3D model of the electronics stack in the Vence Collar Prototype 3.
Previous field trips were very informative about cattle farms. These earlier experiments also showed us various ineffective design approaches in the face of realities of a cattle farm. Empowering our team with the addition of an industrial designer our third prototype is more compact, robust and easy to use. We also completely restructured the code base to produce a more streamlined and customizable distributed control architecture.
We are looking forward to running tests and with little luck we will demonstrate the efficacy of the technology we developed for Vence.

Gearing up for 3rd Vence Field Test
We are preparing for the third field trip for the Vence project. We will be in sunny California for this round from April 4th through April 16th. Building on the experience we had gathered in our previous field tests we will be focusing on single and herd level behavioral control of cattle. Bringing in industrial design and web application development expertise the Vence system that will be available in this trip will be more robust and easer to use.
Blurring Lines Between Machine and Biology
The original article can be found on Roboalliance.com. Roboalliance will be discontinued by its founding sponsor, Sharp, on July 2nd, 2018.
In the not too distant simple days of the past, the distinction between a user and his machines was clear. The user, a human, was the master, taking all the decisions, making all the observations and driving machines’ actions at great detail. Machines were essentially sophisticated hammers which would be nothing more than a useless pile of metal and plastic without their user.
Steady improvements in computing and sensing technologies coupled with algorithmic discoveries relating to decision making have transformed machines from passive entities to active partners to humans. With availability of more capable machines and the unrelenting aspiration to achieve ever higher levels of efficiency comes the unavoidable removal of humans from process flows. This shift is in fact not novel at all. Replacement of humans with other agents, may that be a machine and/or an animal, have always taken place to increase productivity. For instance, cows had replaced humans in ploughing farm land many thousands of years ago. An artificial intelligence software replacing the taxi driver today is just the most recent chapter in a long book. This being said, today humans are being pushed out of work flows at such an astounding speed, it presents a major social problem and is starting to cause a small panic. Discussions on the impending technological unemployment problem due to automation and proposed solutions such as Universal Basic Income are some of the downfall of this tectonic shift.
While conversations on the effects of automation on human societies assume mostly dystopian overtones, we at Robolit believe that this is a rather myopic perspective. It is true that the human society of today will cease to exist and most any change is scary, especially for the older crowd. However, the next phase in human evolution, where the historically clear boundary between user and machine will be ever so blurred, will be much more exciting and full of opportunities. In this article we will look into some examples from the global research community as well as some of Robolit projects that signal great potential in this new era.
To see the opportunities in this new era one must change their perspective in some fundamental manner. More specifically, we note that in this new paradigm neither the term user necessarily implies a human, nor a machine has to be an electromechanical system of some sort, nor a top-down decision hierarchy will remain. In contrast to the classical human machine interface literature, where a human is always assumed to be at the top of the decision totem driving collections of artificial systems, we observe this emerging era offers a much richer set of level partnerships between artificial and biological systems.
Historically, and even still today, humans surpass machines in higher level decision making in most any practical scenarios. For this very reason we are accustomed to having humans assume the decision making role. However, the steady rate of progress in decision making heuristics in general and artificial intelligence in particular suggests that in the near future computers will come on par with, and may be even exceed, their human counterparts in this area. Applications in our daily life such as natural language processing, autonomous driving and face recognition are just a few examples showing signs of this inevitable future.
This being said the fast paced developments in the information processing capabilities are not quite matched in other aspects of general machine design. Most notably physical capabilities such as dexterous interaction with objects or locomotion in broken and unstable natural settings are lacking in contemporary systems. Undoubtedly, machines will eventually achieve physical qualities that match biological systems. However, it is clear that the rate of improvement in physical capabilities is significantly lower than that of information processing capabilities. Consequently, we note that there will be a time period where artificial systems will provide high level of intelligence while lacking physical capabilities. We believe this is where the next family of killer applications.
There are numerous examples in the global research arena beautifully demonstrating the potential in proper integration of artificial and biological agents. For instance, work by David Eagleman demonstrates that the flexible nature of neural systems in humans can be taken advantage of to introduce new sensory capabilities that are not available in our nature. New perspective, faster access to information, deeper understanding of big data with assistive analysis software are just some of the new super powers this marriage between biology and technology will offer us humans.
Inspired by this observation, at Robolit, we identified a unique opportunity for a novel human machine partnership where computers take on high dimensional information processing and decision making tasks while humans perform physical tasks in the field as identified by computers. A specific example for this operational model is the Hotel Operation System (hOS) under development in partnership with Drita Hotel Resort & Spa. The core of this system is a data center that is tied to numerous information sources across the hotel grounds, automatic IoT collected as well as manually entered by human operators. A family of artificial intelligence software applications constantly process incoming data streams and produce decisions. In turn, these decisions are relayed to proper employees through their smart phone and/or tables to be physically executed. For instance, room check outs at the front desk directs housekeeping to clean the room and guest relations to contact the guest to apply the exit survey. Elimination of middle management provides significant cost reduction and improved speed and follow through improves user experience. In essence, the employees act as remote manipulators and sensors for the central computer and decision making software. This approach improve upon shortcomings of human decision making process while avoiding the need to develop robotic systems that are extremely costly at this moment in time.
Another novel example for machine/biology partnership can be observed in the developing cattle management system by the Vence Corp—another project Robolit has the opportunity to participate as a technology partner. In its core the Vence system aims to influence the swarm behavior of cattle herds in order to move animals across their pasture to achieve optimal grazing. While in its initial incarnation the Vence system is yet another master/slave type controlled biological system application, in the long term a Vence powered cattle will be a free range animal that is granted extra sensations and instinctual drives enabling it to find the best grass in its environment. Much like the hOS powered hotel employees or David Eagleman’s vibrating jacket wearer, the cattle of the future in the Vence architecture, a non-human biological user, will take advantage of new senses technological integration offers and be fed better and live more freely.
Our final example for advantageous partnership opportunities between biological and artificial systems is the Sharp’s Intellos automated unmanned ground vehicle (A-UGV). While at the first glance the Intellos system is a simple mobile security camera, that is indeed just the tip of the complete solution that is offered by Sharp. The essence of the Intellos system is based on the very same observations that the previous hOS and the Vence examples take advantage of, i.e., augmenting humans’ with powerful data gathering and decision making capabilities while taking advantage of humans where they still exceed their artificial counterparts. Allowing a single security person to be at multiple points at the same time and process tens of video streams simultaneously to identify what requires in person attention is the competitive advantage Intellos offers.
The convergence of various fields and the ubiquitous availability of computational power, communicational bandwidth and freely available algorithmic mechanism will open up new avenues for marrying biological systems with artificial capabilities. We like it or not the merging between us and machines has already began with the smart phones. It is important to identify the “good” partnerships that enrich our lives. Just like 90’s animated gif ridden bad web site designs, not all applications of a technological paradigm produces good products. It is our job as creators of the future to build the clean and functional marriages between nature and machine.