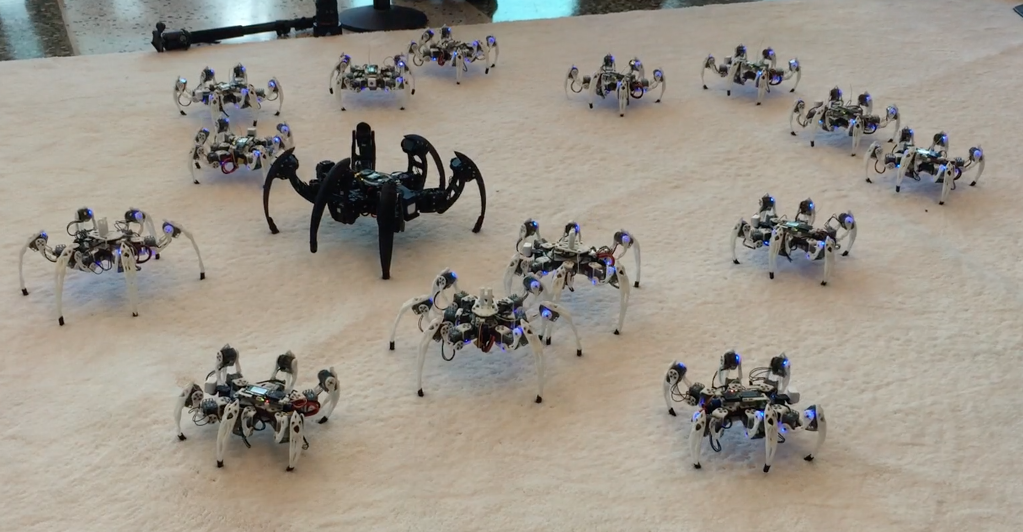
Dancing Hexapod Swarms

Intel Edison powered hexapod robots designed by the Intel research team.
A blast from the past. In 2015 Robolit participated in the Intel Developer Forum as a design consultant as part of the keynote speaker technology demonstration. We were tasked with making a 50 member hexapod robot swarm to dance to the Up Town Funk.
In the course of our work we produced the World’s first Mexican wave by robots. A lighting effect added into the Marauder, a hexapod with unique sliding mode locomotion mechanism, transformed the machine into a Starwars character. A list of video clips from this work can be found at the Robolit YouTube channel.
Haldun administrator
Dr. Komsuoglu is a robotics expert and entrepreneur with over 20 years of research, development and start-up experience. Focusing on biologically inspired high-performance mobility and high-dexterity manipulation systems Mr. Komsuoglu served as a key personnel in several critically acclaimed multi-institutional robotics projects sponsored by Defense Advanced Research Projects Agency (DARPA), United States Army Tank Automotive Research, Development and Engineering Center (TARDEC) and National Science Foundation (NSF). Some noteworthy projects he was involved with includes DARPA-CBS, DARPA-RHex, DARPA-RiSE, NSF-FIBR and MA-UGV. In these projects Dr. Komsuoglu engaged experimental robotic research, simulation, embedded system development (hardware/software), control systems engineering and analytic studies. Since 2006 Dr. Komsuoglu has been heavily engaged in business development. He founded and ran technology start-up companies focusing on commercialization of several robotic technologies he helped develop. In 2009 he founded Robolit LLC (https://www.robolit.com) providing design consulting for academic research equipment, search and rescue systems for first responders and military applications. His current work focuses on remotely controlled UAVs with a unique UI system employing virtual reality devices with applications in first response and entertainment industry. Since 2011 Dr. Komsuoglu has been serving as an active member of the DHS-NIST-ASTM Standard Robot Test Methods committee and is responsible of development of manipulation test methods.
About the Author